Actualités & articles
Asservissement visuel du Qube Servo 2
Cet article est issu de l’article original Project-based Learning with QUBE-Servo 2.
Apprentissage par projet avec le QUBE-Servo 2
Depuis 7 ans, le QUBE-Servo 2 a été largement adopté par les universités du monde entier. Il est fourni avec deux modules interchangeables, un disque d’inertie et un pendule, qui peuvent être utilisés pour effectuer une série d’expériences de contrôle standard. Mais l’une des caractéristiques clés du QUBE est sa flexibilité, puisque vous pouvez construire et attacher vos propres modules.

Projet d’asservissement visuel du QUBE SERVO 2
Pour démontrer l’idée, nous avons décidé de développer un projet classique de boule et de poutre pour le QUBE-Servo 2. Du point de vue des commandes, contrôler la balle sur une poutre à l’aide d’un servo pose un ensemble unique de défis, dont j’ai discuté dans un précédent article de blog . Ce projet permet aux étudiants de concevoir leur propre faisceau et de mettre en œuvre un contrôle de balle et de faisceau basé sur la vision à l’aide d’une webcam. Un dessin schématique ainsi qu’un prototype réel sont présentés ci-dessous. Le système que j’ai conçu se compose d’un faisceau en forme de L imprimé en 3D qui se monte directement sur le moyeu du moteur à courant continu et d’une balle de ping-pong standard. Cependant, différents types de poutres et de billes pourraient être utilisés.
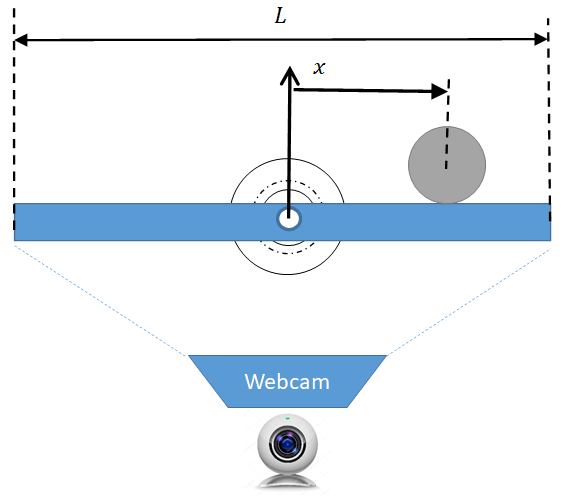
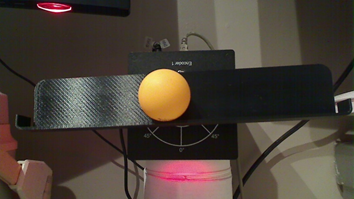
Schéma de principe et mise en œuvre réelle de la fixation Ball and Beam
Il consiste en une conception mécanique de l’assemblage du faisceau, en mettant en œuvre un schéma de contrôle pour l’équilibrage de la balle, ainsi qu’en un traitement d’image.
Aperçu du projet
Le concept de boucle de contrôle de la boule sur une poutre est illustré ci-dessous. La position de la balle est mesurée à l’aide d’une webcam et de divers outils logiciels d’acquisition et de traitement d’images (par exemple le bloc QUARC Video Capture). La boucle extérieure, le contrôleur de position de la balle, calcule l’angle d’asservissement nécessaire pour stabiliser la balle à la position de balle souhaitée en fonction de la position de balle mesurée. La boucle interne, le contrôleur de position d’asservissement, applique la tension nécessaire pour suivre l’angle d’asservissement souhaité en fonction de l’angle actuel mesuré par l’encodeur.
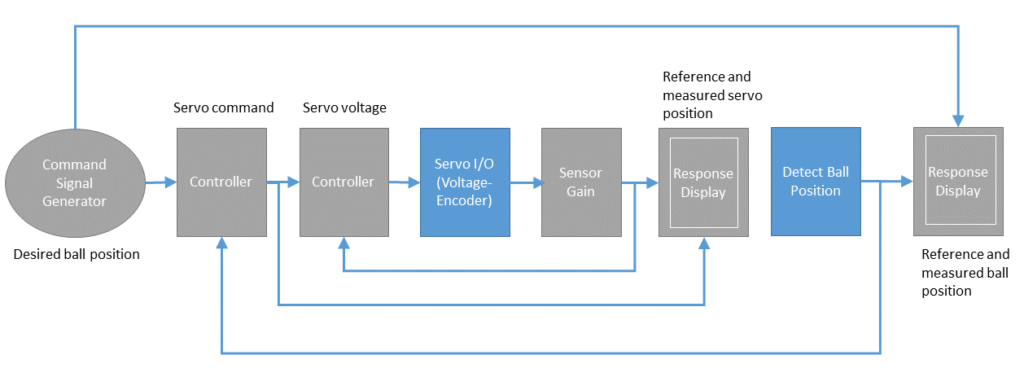
Ci-dessous, une vidéo de notre prototype en action.
Lecteur vidéo
Approche de conception de système mécatronique moderne
Un système mécatronique est un type de système intelligent qui intègre des capteurs, des actionneurs, des capacités de calcul et des protocoles de communication. Un drone, par exemple, est un système mécatronique. Il possède un processeur embarqué avec un capteur IMU et des actionneurs d’hélice.
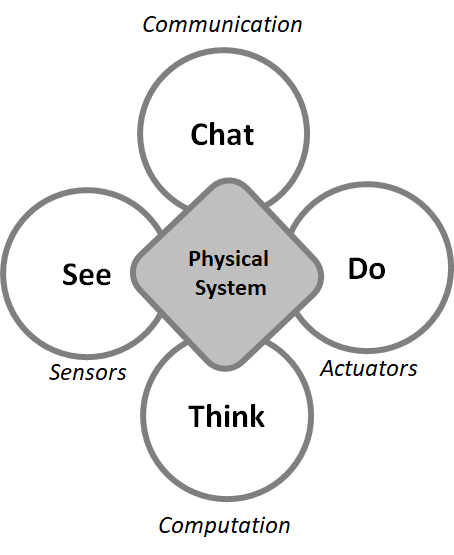
Sur la base de la définition ci-dessus, notre système à billes et à faisceaux proposé est également un système mécatronique, car il intègre les composants suivants :
- Capteurs : Encodeur QUBE-Servo 2 et capteur de position de bille (ex webcam)
- Actionneurs : Moteur QUBE-Servo 2 DC
- Calcul : Contrôleur fonctionnant sur PC/ordinateur portable/MCU
- Communication : Périphérique d’acquisition de données (DAQ) USB QUBE-Servo 2
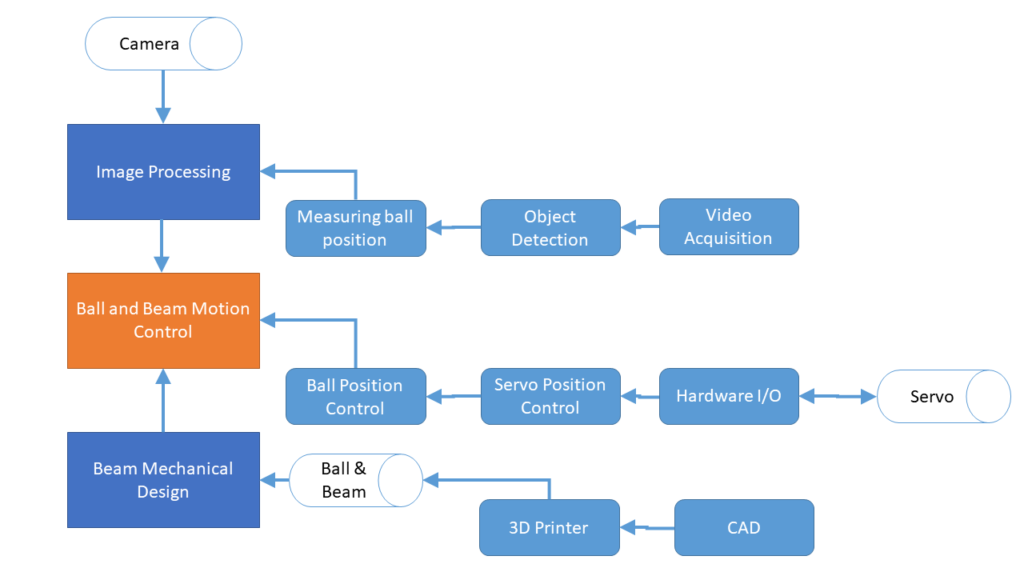
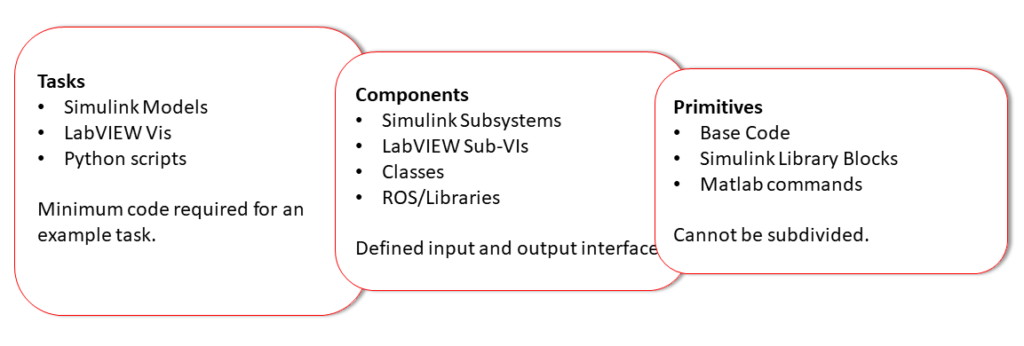
Les ressources logicielles nécessaires à la réalisation du projet peuvent être réparties dans les trois groupes indiqués ci-dessous : tâches , composants et primitives .
Afin de répondre aux différents niveaux d’expérience (c.-à-d. de premier cycle et des cycles supérieurs), l’instructeur peut choisir ce qu’il doit fournir. Voici un exemple de répartition :
| Niveau 1 | 1 ère ou 2 ème année de licence |
|
| Niveau 2 | 3 ème ou 4 ème cycle de l’ année |
|
| Niveau 3 | Projet d’études supérieures ou avancées de premier cycle |
|
Par exemple, si ce projet est mis en œuvre à l’aide de MATLAB/Simulink et QUARC, selon le niveau visé, les étudiants peuvent effectuer les opérations suivantes :
- Niveau 1 : Le modèle Simulink complet (c’est-à-dire la tâche) est fourni. L’élève testerait le modèle et réglerait les valeurs. Aucune modification de conception majeure à effectuer.
- Niveau 2 : Bibliothèque Simulink fournie par l’instructeur qui comprend un sous-système logiciel (c’est-à-dire des composants). Les étudiants utilisent le bloc de sous-système Simulink prédéfini dans ces bibliothèques pour concevoir la tâche.
- Niveau 3 : L’instructeur peut fournir quelques composants pour certaines tâches, mais pour la plupart, l’étudiant utilisera les primitives eux-mêmes. Ici, l’étudiant concevrait la tâche à l’aide des blocs Simulink des bibliothèques Fundamentals et QUARC Targets .
Pour aider les enseignants à mettre en œuvre ce projet, nous avons rassemblé les ressources suivantes :
- Guide de l’instructeur : feuille de calcul Excel qui détaille la documentation et le logiciel pour chaque tâche du projet pour les trois niveaux différents.
- Présentation Power Point : Passe en revue l’ensemble du processus de conception et de mise en œuvre du contrôle. Les instructeurs peuvent décider des diapositives à utiliser pour leur cours ou à partager avec leurs étudiants.
- Contrôleurs : Les scripts MATLAB, les modèles Simulink et les bibliothèques Simulink. Ceux-ci sont répartis entre des fichiers de type “design” et “tune”. Les fichiers « design » utilisent des primitives . Dans ce cas, les primitives sont les blocs Simulink et QUARC Target. Les fichiers « tune » utilisent des composants ou des bibliothèques Simulink prédéfinies.
- Vidéos : vidéos illustratives qui montrent toutes les étapes du processus de conception.
L’instructeur peut choisir les fichiers à fournir à ses étudiants en fonction de leur niveau d’expérience à l’aide de la feuille de calcul du Guide de l’ instructeur . Par exemple, si le projet doit être réalisé par 3 ème année , les étudiants qui ont seulement pris un cours sur les systèmes de contrôle alors l’instructeur peut choisir de fournir différents composants ( par exemple les bibliothèques Simulink) aux étudiants pour les tâches liées au contrôle de mouvement de la servo et la balle sur la poutre.
Nous avons eu des types de projets similaires réalisés par des utilisateurs existants de Quanser, comme dans NYIT (voir ci-dessous). Cela peut être intégré dans les laboratoires d’un cours existant, attribué en tant que projet d’équipe de dernière année, utilisé dans un cours « sprint », etc.
Comment puis-je accéder?
Il s’agit d’un défi de conception orienté projet très flexible qui peut être adapté aux étudiants ayant des niveaux d’expérience et des antécédents différents. Il peut être intégré dans les laboratoires d’un cours existant, affecté en tant que projet d’équipe de dernière année, utilisé dans un cours « sprint », etc.
Si vous êtes un instructeur intéressé à exécuter cela ou à en savoir plus sur les ressources du projet disponibles, veuillez nous contacter à info@quanser.com avec la ligne d’objet « QUBE-Servo 2 Ball and Beam Design Project ». L’un de nos ingénieurs Quanser vous contactera et vous montrera comment commencer.
Nous avons également une version « Démarrage rapide » disponible qui vous permet d’exécuter le contrôleur complet et de voir s’il convient à votre cours. Les exigences matérielles et logicielles sont répertoriées ci-dessous.
Configuration matérielle/logicielle requise
- MATLAB/Simulink
- QUARC Essentials
- QUBE-Servo 2
- Webcam
- Ball and Beam (par exemple, poutre imprimée en 3D avec balle de ping-pong)
Remarque finale : projet NYIT Capstone Ball and Beam
Cette approche d’apprentissage par projet a d’abord été réalisée avec Ziqian (Cecilia) Dong , professeur agrégé au département de génie électrique et informatique du New York Institute of Technology (NYIT) pour le projet de conception senior EENG 491 au printemps 2011 et 2012.
Les étudiants de 4e année de premier cycle ont appris la conception et la mise en œuvre de systèmes de contrôle à l’aide de l’unité de base servo rotative et des systèmes Ball and Beam avec le logiciel de contrôle en temps réel QUARC. Les étudiants avaient peu d’expérience avec les systèmes de contrôle ou beaucoup n’avaient jamais utilisé MATLAB/Simulink. Après avoir appris la conception et la mise en œuvre du système de contrôle, ils ont conçu leurs propres systèmes d’équilibreur à billes à 2 degrés de liberté en utilisant différentes techniques de détection de la position des billes. Pour plus d’informations, reportez-vous à l’article présenté par le professeur Dong et ses collègues lors de la conférence annuelle de l’ASEE en 2012, intitulé AC 2012-2956 : Infusing the Curriculum with Cutting Edge Technologies through Partnerships with Industry.